[custom_headline type=”left” level=”h1″ looks_like=”h2″]miBotTM[/custom_headline]
Positioning, manipulation and sensing at micro and nano scales finally made truly fast and easy.
With 4 degrees of freedom in an ultra compact and light body, the miBot is a unique piezo-based positioner. Contrary to a traditional manipulator, the miBot is a mobile robot. It is virtually untethered and free to move over the surface of the base where your sample is placed. Since it has no mounting screws, the miBot can be coarsely positioned by hand and naturally adapts to changing sample size and geometry.

Intuitive to control
The miBot moves along its natural axes; no rotational and translational motion are coupled. This makes it extremely intuitive to control and everyone in a lab will only need a few minutes of training before starting to get results. The miBot ease of use also greatly contributes to reduce the risk of damaging your samples and gives confidence to carry out delicate positioning maneuvers.
From micrometer to nanometer
The miBot moves in two different modes, providing scalable positioning resolutions from the micrometer to the nanometer. In stepping mode, the piezoelectric actuators are operated with AC voltage. The range of displacements of the miBot are several centimeters with a resolution up to 40 nm. No signal is applied on the actuators to maintain the position. In scanning mode, DC voltage is applied and maintained on the actuators with the amplitude defining the displacements. The range of displacements is a few hundreds of nanometers with a resolution up to the nanometer.
The high stiffness of the miBot monolithic design makes this high precision instrument very robust to vibration and guarantees that motion are smooth even at high optical magnifications. Additionally, the small size of the miBot provides better mechanical and thermal stability than manipulators with larger lever arm caused by their serial design.
Benefits
- Probe large samples with vibration free nanometer resolution motion.
- Experiment faster while reducing the risk of damaging your samples and getting more results.
- Reduce footprint of positioning instruments on your test bench or microscope.
- Protect your investment over time with a versatile system designed for upgradability.
Features
- Scalable positioning resolution (µm to nm)
- Centimeter range displacements
- Compact and robust design
- Decoupled movements
- Operates under high vacuum
- Compatibility with multiple tools and probes
Probing the Electronic Properties of Nanowires in SEM
This presentation has been held by Prof. Ton van Helvoort at NTNU Throndheim, Norway (www.ntnu.edu) during the Imina Technologies’ webinar session that took place on September 24, 2014. The work described in this presentation is done at NTNU NanoLab and within the Nanowire Project lead by Prof. Bjørn-Ove Fimland and Prof. Helge Weman at the Department of Electronics and Telecommunication.[/text_output][accordion][accordion_item title=”Presentation details”]Professor van Helvoort introduces in his presentation the interest of using III-V semiconducting nanowires in future optoelectronic devices. He highlights the need to characterize the electronic properties of such nanowires in order optimize them for these applications and summarizes the challenges his group encountered in pursuing that objective.
He then describes the methodology they followed to deposit metal using e-beam (EBID) to contact the nanowires and the probing set-up they have built to carry out the electrical measurements inside the vacuum chamber of their electron microscope. Some examples of measurements are given and strategies for improvements and future experiments are discussed.[/accordion_item][/accordion]
Single Cell Manipulation with Micropipette
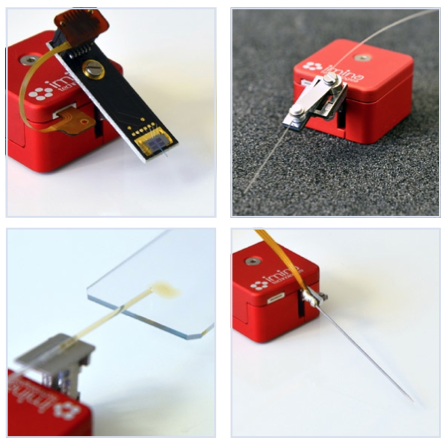
Hands-on experiment showing the manipulation of a single mouse primary bone marrow cell with a glass micropipette assisted by a miBot micromanipulator.
Manipulation of nanowires
Manipulation of copper nanowires with 2 miBot nanomanipulators. The nanowires are very quickly and easily extracted from a large bundle before being contacted with sharp tungsten probes.
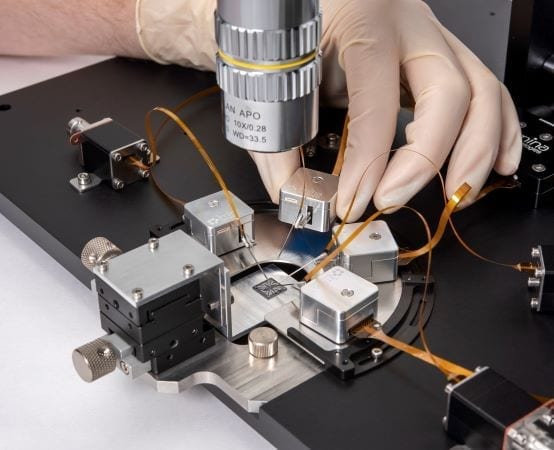
Installation of the miBot nanomanipulators in a SEM
Installation of a probing platform and miBot nanomanipulators in a scanning electron microscope (SEM). Setup time for nanometer positioning resolution can be achieved in a matter of minutes.
Semi-automatic wafer probing
Assisted probing of LED chips with miBot micromanipulators and an XY nanopositioning stage. The process is fast and intuitive and enables to save time on repetitive wafer probing operations.[/text_output]
Fiber Optic Positioning
Nanometer precision positioning of an optical fiber with the miBot. The 4 degrees of freedom of this very compact and easy to use micromanipulator enables to freely move around centimeter scale samples. The operation of photon collection or localized illumination on light emitting and photovoltaic materials or nanostructures is therefore optimized and drastically simplified.
Dynamic Characterization of a MEMS Resonator
The resonant frequency and displacement of a MEMS resonator device is characterized by Digital Holographic Microscopy (DHM). Two miBot micromanipulators are used to contact the electrical pads on the device, without damaging the wire bonds.
TEM Sample Preparation
Manipulation of 80 nm nanowires under observation of a Scanning Electron Microscope (SEM) for Transmission Electron Microscopy (TEM) sample preparation. This potentially difficult task is greatly simplified due to the nanometer positioning resolution, and large range of motion of which the miBot nanomanipulator is capable.
Flexure testing of a MEMS AFM cantilever
A miBot nanomanipulator is used to deform an AFM cantilever for flexure testing in a SEM. In situ testing of MEMS and NEMS devices is often advantageous during the R&D phase to quickly detect flaws or abnormalities.[/text_output]
| Degrees of Freedom | 2 en translation (X & Y –> body) 2 rotations (R & Z –> body+ arm) |
| Dimension & weight |
Body : 20.5 x 20.5 x 13.6 mm 3 arm: 8.3 mm (without tool) weight: 12 g (without tool) |
| Motion Range * |
Stepping : X, Y: typ. 5 cm 7 | R : ± 180° 7| Z : 42° (arm rotation) Scanning : X: 440 nm | Y: 250 nm | Z: 780 nm |
| Positioning Resolution* |
Stepping : 50 nm (X, Y), 120 nm (Z) Scanning : 1.5 nm (X, Y), 3.5 nm (Z) |
| Speed* |
X and Y: up to 2.5 mm.s-1 Z: up to 150 mrad.s-1 |
| Forces & Torques* |
X and Y : Push : 0.3 N | Hold : 0.2 N Z : Lift : 0.7 Nm (5 g) | Hold : 0.9 Nm (6gr) |
| Temperature Range | 273 K to 353 K |
| Humidity | < 95% (non condensing) |
| Lowest Pressure | 10-7 mbar 1 |
| Probing Signal |
Voltage : ± 100V current : < 100fA 2 – 100mA frequency : < 25MHz 2 resistance : typ. 3.5 Ω |
*Specifications are measured at tool-holder tip (label “THT” on shema) and measured at 300 K. All technical specifications are approximate values.
[image type=”none” float=”none” info=”none” info_place=”top” info_trigger=”hover” src=”3325″][text_output]
| Front Connector Pinout | Probing | DC Voltage | Sensor |
| Pins 1+6 | – | -185 – 185V DC 5 | 5V DC |
| Pins 2+5 | GND | GND | GND |
| Pins 3+4 | Signal / GND 4 | Signal / GND 4 | 0–5V 6 |
1 Vacuum compatible version required (miBot BT-11-VP).
2 Low current, low noise probing accessories and suitable measuring environ-
ments required.
3 Select and adjust parameters from software. Available with miBase BS-43 & MultiBot MB-43.
4 Set pin to probing signal or ground.
5 Adjust amplitude from software (resolution: 1.5V). Drive capacitive loads only.
6 A/D signal output available from software (resolution: 10 bits).
7 In stepping, actual motion range in X, Y, R are limited by the size and shape
of the stage where the miBot moves, and the length of the driving cable. This varies depending of the solution package.[/text_output]
Probes, Micro-Tools & Sensors
Extend the use of your miBot to various types of applications thanks to its compatibility with several tools and sensors. In fact, the miBot is equipped with a proprietary tool holder mechanism that makes the exchange or replacement of tools fast and convenient. In min- utes, turn the miBot from an electric probe or optical fiber positioner into a manipulator of nanoparticles or biological samples.
Tool holders are available for the following tools:
| Probe tips | Tip radius : 10 nm à 20 µm Materials: Tungsten, Gold Plated, Tungsten Carbide, BeCu Shank diameter : 0.51 mm (0.020”) Overall Length: 15 mm (0.6”) and 38 mm (1.5”) Probe orientation with holder: 0° and 30° |
| Optical fibers | Outer diameter : typ. 250 µm |
| Microgrippers | Initial (max.) gripper arm opening : 60 µm |
| Micropipettes | Glass capillary : typ. OD = 1 mm, ID = 10 µm |
| Your tools | Do you need to position other tools like for example a MEMS, multiprobes, miniforks, AFM probes, or force sensors? Con- tact us, several OEM tool holders are available upon request. |